電子制御式インジェクションポンプ
電子制御式インジェクションポンプは、コントロールユニットにより燃料噴射量や噴射時期などを制御するもので、列型と分配型とでは、それぞれ次のように組み合わせて用いる。
- 列型インジェクションポンプ
- 燃料噴射量制御をコントロールユニットで行う組み合わせ
- 電子ガバナ+メカニカルタイマ
- 電子タイマ+メカニカルガバナ
- プリストローク電子制御式インジェクションポンプ+メカニカルガバナ
- 燃料噴射量および噴射時期制御をコントロールユニットで行う組み合わせ
- 電子ガバナ+電子タイマ
- プリストローク電子制御式インジェクションポンプ+電子ガバナ
- 燃料噴射量制御をコントロールユニットで行う組み合わせ
- 分配型インジェクションポンプ
- 燃料噴射量および噴射時期制御をコントロールユニットで行う組み合わせ
- 電磁スピルバルブ+電子タイマ
- 燃料噴射量および噴射時期制御をコントロールユニットで行う組み合わせ
ここでは、列型インジェクションポンプにおけるプリストローク電子制御式インジェクションポンプと電子ガバナを組み合わせたシステム(以下、電子制御式インジェクションポンプと呼ぶ。)について解説していく。
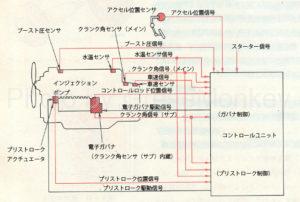
図1:プリストローク電子制御式インジェクションポンプ+電子ガバナ
電子制御式インジェクションポンプは、エンジンの運転状態を検出する各センサの信号をもとに、コントロールユニットからの信号によってプリストローク可変機構で燃料噴射時期を、電子カバナで燃料噴射量の制御を行っている。
プリストローク可変機構(噴射時期の制御)
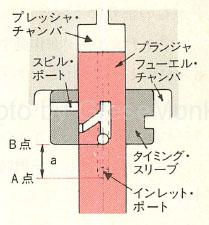
図2:プランジャのプリストローク
プリストロークとは、図2のようにインジェクションポンプのカムが回転し、プランジャのリフト開始のA点から噴射はじめのB点までのカムリフト量(a)をいい、従来型のインジェクションポンプでは、プランジャバレルが固定されているので、プリストロークは一定であるが、電子制御式インジェクションポンプでは、タイミングスリーブの位置を自由に変えることができる可変機構を設けているので、この位置を上下に移動させることによりプリストロークを変化させて、噴射時期を変えている。
つまり、タイミングスリーブが下方にあるときには、プリストロークは小さく、噴射時期は早くなり、逆に、タイミングスリーブが上方にあるときには、プリストロークは大きく、噴射時期は遅くなる。
したがって、エンジンの低・中速域ではプリストロークを大きく、高速域では小さくすることにより噴射時期の制御を行っている。
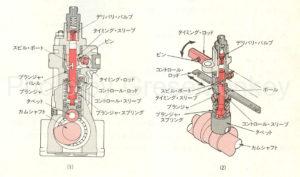
図3:ポンプ本体
プリストローク可変機構では、図3のようにポンプ本体のコントロールロッドの上部に回転可能なタイミングロッドが平行に取り付けられている。また、プランジャバレルの中間には、プランジャのリフト方向に移動可能で、かつ、スピルポートをもつタイミングスリーブが取り付けられ、スリーブの溝にはタイミングロッドのピンがはまっている。
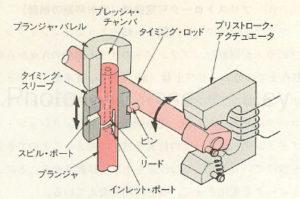
図4:プリストローク可変機構
したがって、コントロールユニットからの信号によってプリストロークアクチュエータが作動すると、図4のようにタイミングロッドの回転がピンを介してタイミングスリーブに伝わるので、タイミングスリーブが上下に移動して噴射時期が変化する。
噴射量の制御
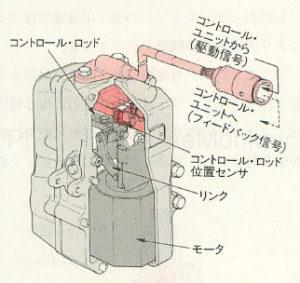
図5:電子ガバナ
噴射量の制御は、コントロールユニットからの信号で作動する電子ガバナで行っている。
電子ガバナは、図5のようにコントロールロッド、リンク機構、モーター、コントロールロッド位置センサなどで構成されている。
コントロールユニットからの信号によりモーターが作動すると、モーターの上下の動きがリンク機構を介してコントロールロッドに伝わるので、コントロールロッドが左右に移動して噴射量が増減する。
センサ
センサは、エンジンの運転状態に応じた電気信号を検出し、コントロールユニットに入力するもので、ここでは、コントロールロッド位置センサ、プリストローク位置センサ、クランク角センサ、ブースト圧センサ、アクセル位置センサ及び水温センサについて解説する。
コントロールロッド位置センサ
コントロールロッド位置センサは、図5のようにコントロールロッドの端に取り付けられており、コントロールユニットから指示された目標コントロール位置に対して、実際のコントロールロッド位置を検出してコントロールユニットに入力する。
プリストローク位置センサ
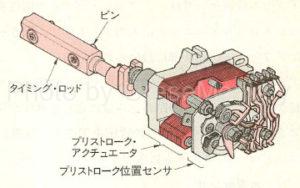
図6:プリストローク位置センサ
プリストローク位置センサは、タイミングロッドの端に図6のようにプリストロークアクチュエータに一体で組み付けられており、コントロールユニットから指示された目標プリストローク位置に対して、実際のプリストローク位置を検出してコントロールユニットに入力する。
クランク角センサ
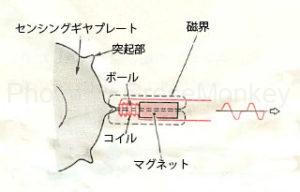
図7:クランク角センサ
クランク角センサは、エンジンの回転速度及びピストン上死点位置を検出するもので、一般にメインおよびサブの2つのセンサが設けられている。
クランク角センサは、図7のようにピックアップコイル式で、コイル、ポール、マグネットなどで構成されており、センシングギヤプレートが回転すると、プレートの突起部とポール先端とのすき間が変化し、ピックアップコイルの磁界が変化するため、ピックアップコイルに電圧が発生する。
この電圧をエンジン回転速度およびピストン上死点位置信号としてコントロールユニットに入力する。
ブースト圧センサ
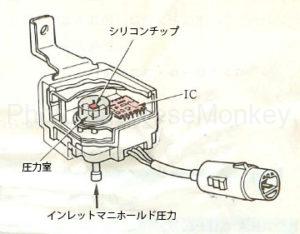
図8:ブースト圧センサ
ブースト圧センサは、インレットマニホールド内の圧力を計測するもので、図8のようにシリコンチップに圧力がかかると、その電気抵抗が変化する性質を持つ半導体を利用した圧力センサで、インレットマニホールド圧力を電気信号としてコントロールユニットに入力する。(インレットマニホールド圧力=負圧)
アクセル位置センサ
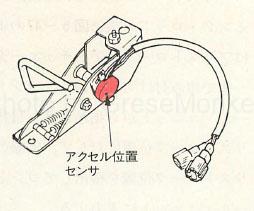
図9:アクセル位置センサ
アクセル位置センサは、アクセルペダルの開度を検出してコントロールユニットに入力するもので、図9のようにアクセルペダル部に設けられている。
アクセルペダルを踏み込むと、アクセル位置センサの可変抵抗が変化し、ペダルの踏み込み量に応じた電圧が発生する。この電圧をアクセル位置信号としてコントロールユニットに入力する。
水温センサ
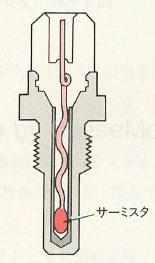
図10:水温センサ
水温センサは、エンジンの冷却水温度を検出するもので、シリンダブロックのウォータジャケット部などに取り付けられており、図10のように温度によって抵抗値が大きく変化するサーミスタを内蔵している。
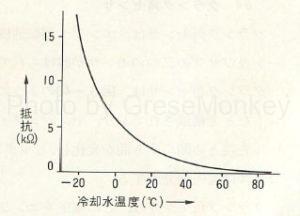
図11:サーミスタの抵抗特性
図11はサーミスタの抵抗値特性をグラフ化したもので、サーミスタの抵抗値は、冷却水温度が高いほど小さくなる。
したがって、水温センサは、冷却水温度の変化をサーミスタの抵抗値に変換して、これを信号としてコントロールユニットに入力する。
コントロールユニット
コントロールユニットは、各センサからの信号を元に、エンジンの運転状態に適した燃料噴射量及び噴射時期を決定するとともに、角センサからの信号系統に異常が発生した場合に、その異常系統を知らせる自己診断システムや危険回避のためのフェイルセーフ機能などを備えている。