電子制御装置・自動車センサ
- 電子制御装置
電子制御装置は、燃料噴射制御を中心に、点火時期制御、アイドル回転速度制御(ISCV),スロットルバルブ開度制御など、エンジン電装品等の制御を、図1に示すようにコントロールユニットで集中的に制御して、エンジンを状況に応じて最適な状態で運転させるものである。
電子制御装置は車両とエンジンの運転状態を検出するセンサとその信号情報を元に演算を行い、制御を行うコントロールユニット及びコントロールユニットからの演算結果としての信号によって作動するアクチュエータで構成されている。
また、角センサからの信号系統に異常が発生した場合に、その異常系統を通知する自己診断システムや、危険回避のためのフェイルセーフ機能及びバックアップ機能を備えている。
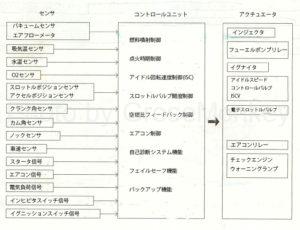
図1:電子制御装置システム図
- 自動車センサの構造・機能
自動車に装備されているセンサは、車両とエンジンの運転状態に応じた電気信号を検出し、コントロールユニットに入力するものである。
ここでは、バキュームセンサ、エアフローメータ、スロットルポジションセンサ、アクセルポジションセンサ、O2センサ、クランク角センサ及びカム角センサの基本的な一例について解説する。
吸入空気量計測
バキュームセンサ
バキュームセンサは、シリコン(半導体結晶)に応力を加えると、その電気抵抗が変化する性質(ピエゾ抵抗効果)を利用した半導体センサであり、インレットマニホールド圧力を電気信号としてコントロールユニットに入力する。
コントロールユニットでは、この電気信号により吸入空気量が計算されて、燃料噴射量、点火時期、ISCVなどの制御に用いられている。
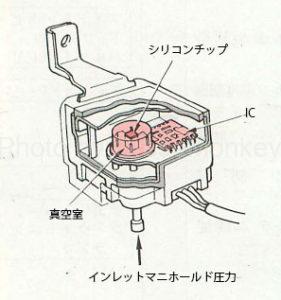
図2:バキュームセンサ
バキュームセンサは、図2,図3のように、真空に保たれたセンサユニット内に、4つの可変抵抗によってブリッジ回路を形成したシリコンチップが取り付けられており、その片面にインレットマニホールド圧力が作用する構造になっている。
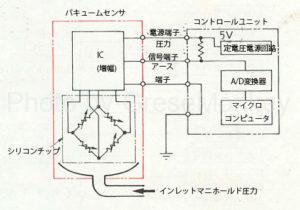
図3:バキュームセンサ回路図
センサに圧力が作用すると、シリコンチップは、反対側の真空室との圧力差により生じた応力を受け、4つの可変抵抗値が変化する。
この抵抗変化による電位差をICにより増幅させ、電気信号に変換して、コントロールユニットに入力する。
電気信号を受けたコントロールユニットは、内蔵されたA/D変換器によりデジタル信号に変換して、演算装置(マイクロコンピュータ・CPU)で、各条件に応じて演算される。
バキュームセンサの出力電圧は、インレットマニホールド圧力が高くなると、出力電圧はほぼ比例して大きくなる特性を持っている。
例えば、大気圧は天候などによって変化するのだが、バキュームセンサは真空状態との差、つまり、絶対圧を検出しているので、車両の周囲に掛かっている大気圧の影響を受けることなく常に適正なインレットマニホールド圧力の電気信号を検出することができる。
エアフローメータ
エアフロメータは、エアクリーナと吸気管との間に取り付けられており、エンジンの吸入空気量を電気信号として検出し、コントロールユニットに入力する。この電気信号により吸入空気量が計算され、燃料噴射量、点火時期、ISCVなどの制御に用いられている。
エアフローメータの形式の種類としては、熱線式、カルマン渦式及びメジャリングプレート式があるが、ここでは熱線式について説明する。
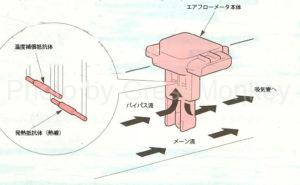
図4:熱線式エアフローメータ
熱線式エアフロメータは、図4のように吸気通路の途中に設けられていて、数百度の一定温度で作用する発熱抵抗体(熱線)と(温度補償抵抗体)によって構成されている。
吸入空気量の電気信号検出は、図4のように吸入空気のバイパス流が発熱抵抗体を冷却することによって行う。
その原理は吸入空気量の量の大小の影響によって、発熱抵抗体にかかる温度が変化(冷却)すると同時にその抵抗値が変化するという性質を利用し、その結果、発熱抵抗体の経路に流れる電流が変動するということを応用している。(電気回路:オームの法則)
発熱抵抗体は、温度が低いと電気抵抗値が小さく、温度が高いと抵抗値は大きくなる。
したがって、
- 吸入空気量が少ない場合には、発熱抵抗体の放熱量が少なくて、電気抵抗値が大きくなるので回路に流れる電流は少ない。
逆に
- 吸入空気量が多い場合には、発熱抵抗体の放熱量が多く、電気抵抗が小さいため、回路の電流が多くなる。
この電気信号による電流の変化をコントロールユニットは、電圧の変化に置き換えて吸入空気量として検知している。
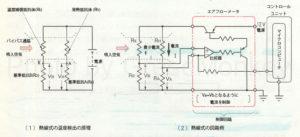
図5:熱線式エアフロメータの回路
実際の回路は、図5に示すようになっており、吸入空気量が多くなると発熱抵抗体の熱を奪うため、発熱抵抗体の温度を一定に保つために電流を増加させなければならない。
そのために、図5(2)の発熱抵抗体の回路に対して並列に抵抗体(Rk/Rb)を設けて、VaとVbの電圧が等しくなるように、比較器(コンパレータ)によって電流を制御している。
この電流値の変化は、図5(2)のVaの電圧を検出し、コントロールユニット(マイクロコンピュータ・CPU)によりI = Va/Ra(オームの法則)の電流値が求められる。
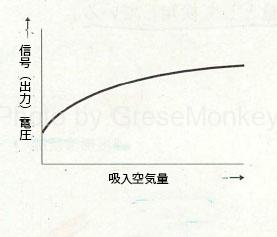
図6:出力特性
電圧Vaは電流Iによって変化するので、信号電圧は図6の特性のように、吸入空気量が多くなると上がり、少なくなると下がる。
また、図5(2)の発熱抵抗体(Rh)だけで空気流量を計測した場合、吸入空気量が同じであっても、空気の温度によって発熱抵抗体(Rh)から奪う熱量が異なるため、正確な空気量の計測ができなくなる。(計測したいのは、空気の量であって、空気の温度ではない。)
したがって、これを改善するために、温度補償抵抗体(Rk)をバイパス通路に設置して吸入空気の温度を計測している。
Rkの抵抗値は、Rhよりも大きく設定されているため、その回路に流れる電流は少なく、抵抗体自体の発熱も小さいので、発熱抵抗体のような空気流量による温度変化の影響はほとんどない。
例えば、吸入空気量が同じ場合でも、吸入空気温度が高くなると、RhとRkの抵抗値はともに高くなる。
同じ空気量(体積量)であっても、空気の温度が高くなるほど、電流Iが小さくなるので、Vaの電圧は小さくなる。このことによって吸入空気質量を検出することができる。
スロットルバルブ開度・アクセル踏み込み量検出
スロットル・ポジションセンサ
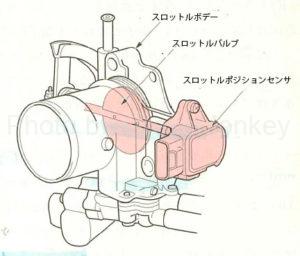
図7:スロットルボデー
スロットルポジションセンサは、図7のようにスロットルボデーのスロットルバルブと同時苦情に取り付けられており、スロットルバルブの開度を電気信号として出力するものであり、コントロールユニットがこの信号を燃料噴射量、点火時期、ISCVなどの制御に使用している。
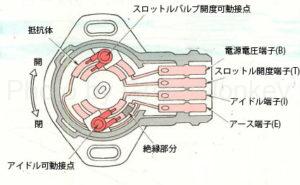
図8:スロットルポジションセンサ
図8に示すスロットルポジションセンサは、抵抗体の上をスロットルバルブで開度可動接点が動くことによりスロットル開度位置を検出するもので、図9の回路図で説明すると、センサ内部の抵抗体(r)の両端にはコントロールユニットから一定電圧が加わっており、スロットルバルブの開度に応じて可動接点が抵抗体(r)上を動くことによりコントロールユニットT端子の電圧が変化する。この信号はA/D変換器によりデジタル変換されて、マイクロコンピュータへ入力される。
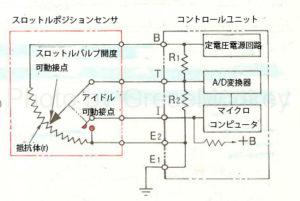
図9:スロットルポジションセンサ回路図
T端子は、コントロールユニット内部で抵抗(R1)を介して定電圧電源回路と、抵抗(R2)を介してE2端子と接続しているが、R1とR2はrに比べて抵抗値が非常に大きいため、電流はB端子→r→E2端子と流れて、T端子の電圧はR1,R2の影響をほとんど受けない。
I端子には一定の電圧が掛かっているが、スロットルバルブ全閉時にはアイドル可動接点がONになり、I端子の電圧は0Vとなる。コントロールユニットのマイコンは、これらのT端子、I端子からの入力信号によりスロットルバルブの開度を判断している。
アクセル・ポジションセンサ
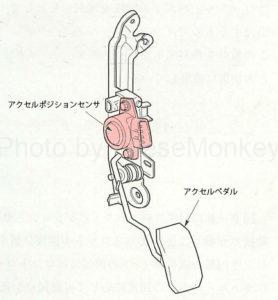
図10:アクセルポジションセンサの取り付け位置
アクセルポジションセンサは、主に、電子制御式スロットル装置に使用され、図10のように、アクセルペダル付近に取り付けられている。
センサ内の抵抗体の上をアクセルペダル開度可動接点が動くことにより、アクセルペダルの踏み込み量と踏み込み速度の信号をコントロールユニットに入力する。
コントロールユニットは、この信号を燃料噴射制御、点火時期制御、ISCVなどに使用している。
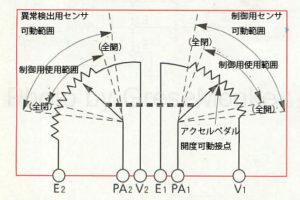
図11:アクセルポジションセンサ
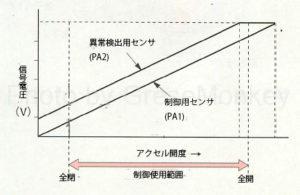
図12:アクセルポジションセンサの出力特性
アクセルポジションセンサには、図11のように制御用と異常検出用の2つのセンサが設けられており、図12のように規定電圧に達するまでは、常に一定の差を保つようになっている。
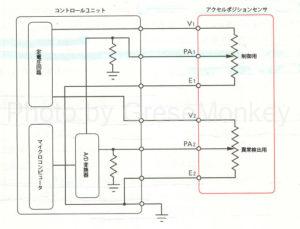
図13:アクセルポジションセンサの回路
アクセルポジションセンサの回路は、図13に示すようになっていて、コントロールユニットがそれぞれのセンサの出力電圧の差を監視し、その差に変化が生じたときに異常と判断してダイアグコードを出力し、退避走行ができるようにフェイルセーフが実行される。
空燃費検出
O2センサ
O2センサは、排気ガス中の酸素濃度を検出し、電気信号として出力するもので、コントロールユニットが、この信号を燃料噴射量や点火時期の制御に使用している。ここでは、ジルコニア式O2センサの起電力増幅作用について説明する。
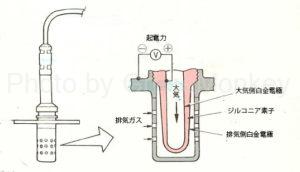
図14:O2センサ(ジルコニア式)
ジルコニア式O2センサは、図14のように試験感情のジルコニア素子の表面に、起電力の増幅作用をする白金をコーティングしたもので、内面に大気を導入し、外面は高温の排気ガス中にさらされる。
ジルコニア素子は、高温で内外面の酸素濃度の差が大きいと起電力を発生する性質がある。
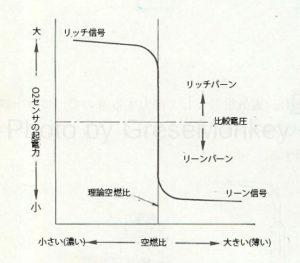
図15:O2センサの出力特性
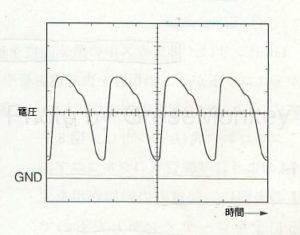
図16:O2センサの電圧特性
この起電力は、理論空燃比付近で急変するので、コントロールユニットは、図15のように電圧変動の中間付近に、比較電圧を設置し、比較電圧よりもO2センサの出力が高いときは、理論空燃比よりも燃料が濃いと判定し、逆に、比較電圧よりO2センサの出力が低いときには燃料が薄いと判定して、インジェクタの燃料噴射量を制御している。
すなわち、燃料が濃いと判定すると噴射量を徐々に減らし、薄いと判定すると、再度、徐々に増量するという細かい制御を繰り返すことにより、常に理論空燃比近くになるようにしている。
したがって、O2センサの出力電圧特性は、図16に示すように周期的な波形になっている。
また、コーティングしてある白金には、排気ガス中の酸素とCOを結合させる触媒作用があり、排気ガス側のジルコニア素子付近の酸素濃度を低下させて、大気側との酸素濃度差を増大させることにより、センサの起電力を発生しやすくしている。
つまり、理論空燃費よりも若干濃い混合気が燃焼した場合でも、排気ガス中に酸素がわずかに残るため、この白金の触媒作用を利用し、残存する酸素をCOと反応させ、酸素量を低下させることによりセンサの感度を高めている。
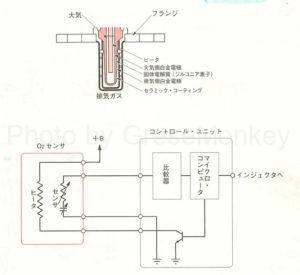
図17:O2センサ(ヒーター付き)回路
O2センサは、軽負荷時などにもジルコニア素子の温度を一定に保ち、安定した電力出力を行うために、図17のように内部にヒータを組み込んだものが多く使用されており、コントロールユニットによってヒーターに流す電流が制御されている。
エンジン回転速度及びピストン基準位置検出
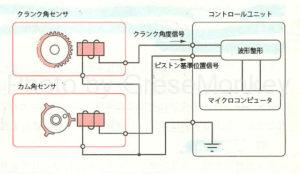
図18:クランク角センサ・カム角センサ回路図
クランク角センサ及びカム角センサには、電磁ピックアップセンサが用いられ、クランクシャフトの角度、回転速度及びピストンの基準位置の検出を行う信号を、図18のようにコントロールユニットに出力し、これらの信号を元に燃料噴射時期、点火時期などの制御に用いている。
信号発生の原理
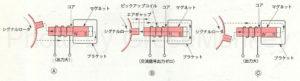
図19:交流信号の発生原理
図19において、マグネットからの磁束は、マグネット→ピックアップコイル→シグナルロータ→ブラケット→マグネットの経路で通過するが、シグナルロータが回転していないときには、磁束が変化しないため、ピックアップコイルには何の変化も起こらない。
しかし、シグナルロータが回転すると図19(A),(B),(C)のようにシグナルロータ突起とピックアップコイルのエアギャップが変化するので、ピックアップコイルを通過する磁束が変化し、この磁束の変化量に応じた電圧がピックアップコイルの両端に発生する。
この発生電圧は、磁束の変化を妨げる方向に発生するので、シグナルロータ突起部がピックアップコイルの中心に近づくときと(エアギャップが小さくなって時速が増加するとき・・・図19(A))、離れるとき(エアギャップが大きくなって磁束が減るとき・・・図19(C))では逆向きとなるため、交流信号として現れる。
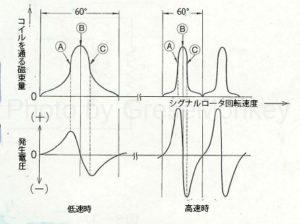
図19:交流信号の発生原理
又この発生電圧は、磁束の変化量が大きいほど、変化時間が短いほど高い電圧にあるため、シグナルロータ突起部がピックアップコイルの中心と対向したとき(図19(B))には、磁束量は最大でも、その変化量はゼロとなるため、発生電圧もゼロとなるが、その前後(図19(a)(c))では発生電圧は最大となり、その最大値はエンジン回転速度の上昇につれて大きくなる。
カム角センサ
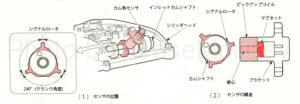
図20:カム角センサ
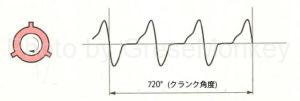
図21:カム角センサの出力波形
カム角センサは、シリンダヘッドに取り付けられており、適切な点火信号をイグナイタへ送るための基本信号となるクランク角度基準位置(上死点及び気筒判別)を検出して、その電気信号をコントロールユニットに送っている。
クランク角センサ
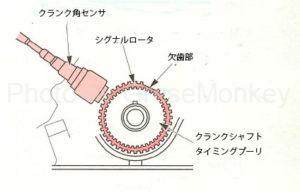
図22:クランク角センサの取り付け位置
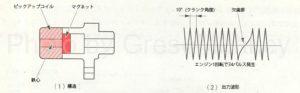
図23:クランク角のセンサの構造と出力波形の一例
図22、図23(1)はクランク角センサの一例で、クランクシャフトタイミングプーリーの近くに取り付けられている。タイミングローターはタイミングプーリーと一体化していて、2枚欠歯した34枚の歯を持っている。
したがって、クランクシャフトが1回転すると、34個の信号が、図23(2)の出力波形のように発生する。この信号をコントロールユニットに出力することによって,10°ごとのクランク角を検出することができる。
また、欠歯した箇所の信号を検出することにより、正確な上死点を知ることができる。
つまり、タイミングローターの欠歯部分をタイミングクランクプーリーの合わせマークに一致するようにセンタを取り付ると仮定して考えてみると、例えば、タイミングベルトを交換するときと同じ要領で第1シリンダーが圧縮上死点になるように合わせマークを合わせれば、自動的に欠歯した箇所の信号も第1シリンダーの圧縮上死点を指し示すことができる。
このことを踏まえれば、カム角センサとクランク角センサを同調させるときに、この欠歯した箇所を基準位置(目印)としてそこからのエンジン回転角度から、各気筒の上死点位置を設定して信号波形を設定することができる。
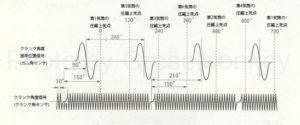
図24:クランク角信号波形の一例
図24は、クランク角センサとカム角センサの信号波形を同調させたものの一例で、図では6気筒エンジンを表しており、欠歯した部分の中心から150°の位置が、第1気筒と第6気筒の圧縮上死点となる。さらに、それらの位置から120°回転した位置が第5気筒と第2気筒の圧縮上死点、さらに120°回転した位置が第3気筒と第4気筒の圧縮上死点となる。
温度検出
水温センサ・吸気音センサ
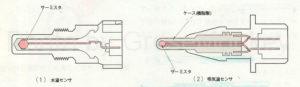
図25:水温センサと吸気音センサ
水温センサ及び吸気音センサは、共に温度を測定するためのセンサで、特性の同じサーミスタが、図25のように先端の内部に組み込まれている。
これらのセンサは、図26の回路のように接続され、この回路は、サーミスタが温度の変化を抵抗値の変化に置き換えているものを、コントロールユニット内のマイコンが検知できるように、電圧値の変化に置き換えるようにしたものである。
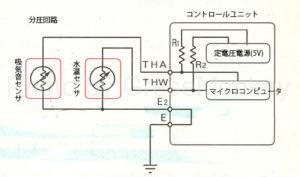
図26:水温センサ及び吸気音センサ回路
水温センサの回路では、図のTHW(水温信号)の電圧、すなわち、抵抗R2と水温センサの抵抗によって、定電圧回路からの5Vの電圧を分圧させた電圧をマイコンで検出している。
吸気音のセンサの回路では、図のTHA(吸入空気温度信号)の電圧が、水温センサの回路と同じように、R1とサーミスタの抵抗との分圧に応じた電圧がマイコンで検出される。
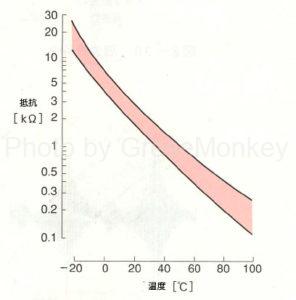
図27:サーミスタの温度・抵抗特性
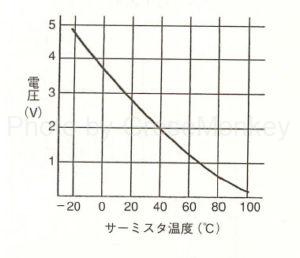
図28:THA及びTHWの電圧とサーミスタ温度との関係
これらのTHAやTHWの電圧は、サーミスタの温度が低くなると、図27のように抵抗値が大きくなるため、図28のように上昇する。
したがって、コントロールユニットのマイコンは、これらの電圧により温度の検知を行っている。
コントロールユニットは、水温センサTHWの電圧信号を燃料噴射量制御、点火時期制御、ISCVなどに、また、吸気音センサTHAの電圧信号を燃料噴射量制御に用いている。
※THW=Thermo Water THA=Thermo Air
その他の信号検出
ノックセンサ
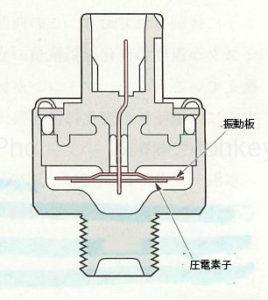
図29:ノックセンサ
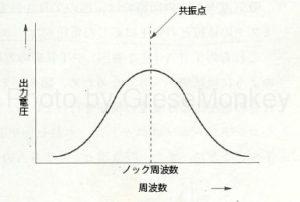
図30:周波数特性
ノックセンサ内には、ノッキングの周波数で共振を起こす振動板に圧電素子が組み付けられている。ノッキングが発生すると、振動板が共振して圧電素子から図30に示すように共振点で大きな電圧が発生する。この共振点での電圧を図31のようにA/D変換器でデジタル信号に変換してマイコンに入力し、点火時期の制御を行っている。
図32はオシロスコープによるノックセンサの出力電圧波形である。
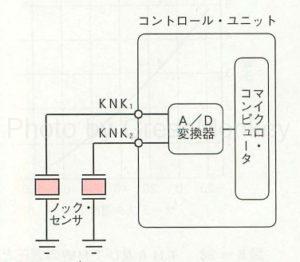
図31:ノックセンサの回路
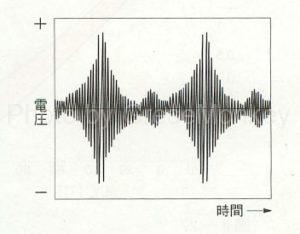
図32:出力電圧波形
※圧電素子:圧力やひずみを加えると起電力を発生する。またその逆に、電圧を加えると歪みを生じる特殊な素子である。
スタータ信号
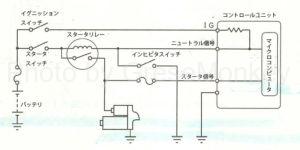
図33:スタータ信号及びニュートラル信号の回路
エンジンの始動性を向上させるためには、始動時に燃料の噴射量を増量して、混合器を濃くすることが必要である。
そのためには、図33の回路のようにスタータのマグネットスイッチに加わる電圧を、スタータ信号としてコントロールユニットに入力し、エンジン始動時の噴射量補正を行っている。
ニュートラル信号
図33:スタータ信号及びニュートラル信号の回路
ニュートラル信号の回路は、図33のようになっており、AT車において、シフト位置がP,Nレンジか、それ以外(L,2,D,R)かを検出するもので、インヒビタスイッチがL,2,D,RではOFFとなり、このスイッチの信号がコントロールユニットに入力され、シフト位置をNレンジからDレンジに切り替えたときのISCVの補正などに用いている。(落ち込み補正)
ブレーキ信号
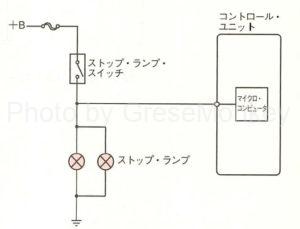
図34:ブレーキ信号の回路
ブレーキ信号の回路は、図34のようになっており、車両の制動状態を検出して、この信号を燃料噴射制御やISCVの制御に用いている。
減速時には、触媒か熱望し及び燃費向上のため、燃料噴射を止めるフューエルカット制御を行っている。
フューエルカット回転速度及び復帰回転速度は、それぞれの車両、エンジン制御特性に合わせて決定され、車両の走行状態によって変化するようになっている。
エアコン信号
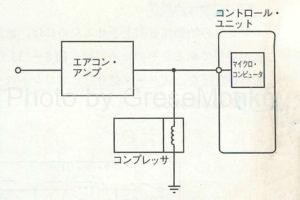
図35:エアコン信号の回路
エアコン信号の回路は、図35のようになっており、エアコンがONかOFFかを検出し、エアコン回路のコンプレッサのマグネットスイッチに掛かる電圧を信号としてコントロールユニットに入力している。
この信号により、エアコンON時のISCVの補正などを行っている。
バッテリ電圧信号
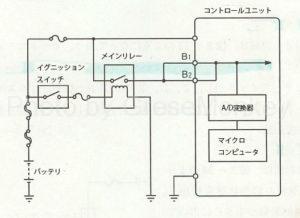
図36:コントロールユニット電源の回路
コントロールユニットそのものを作動させる電源は、図36のようにリレーを介して供給されており、コントロールユニット内のマイコンがその電源電圧のレベルを検出する機能を有している。
検出結果は、燃料噴射時間の補正に使用している。