ハイブリッドカーの基礎

ハイブリッドカーの燃費
ハイブリッドカーは、動力にガソリンエンジンやディーゼルエンジンなど内燃機関を電気モーターと組み合わせて使用するものである。ハイブリッド(hibrid)には「雑種」とか「混成」といった意味がある。したがって、エンジンとモーター以外の組み合わせでも構わないのだが、日本では現在のところ、乗用車ではガソリンエンジンとモーターの組み合わせが、トラックやバスではディーゼルエンジンとモーターの組み合わせが用いられている。
そこで、動力源にエンジンとモーターを組み合わせさえすればいいのかというと、決してそんな単純なものではなく、ハイブリッドカーの燃費が向上する主な要因は次の3つがある。
- アイドリングストップ
- ブレーキ回生
- エンジンの最適条件での運転
アイドリングストップ

アイドリングストップはハイブリッドカー固有の物ではなく、従来のガソリンやディーゼルエンジンでも使用可能な技術である。
アイドリングストップは、市街地走行など平均速度が遅い走行条件ではかなりの効果がある。平均速度が遅いということは、言い換えると、停止している状態が長いということでもある。路線バスなどを除くと国内ではあまり見かけないが、国産車でも、欧米諸国への輸出車では採用している例がある。
同じハイブリッドカーでも、プリウスのようにモーターで発進することが出来るような方式では、このアイドリングストップを徹底的に利用することが出来る。発進をモーターのみで行うため、渋滞など発進と停止を繰り返す際にもエンジンを停止している時間が長いからである。(バッテリーの充電状態が十分である必要がある。)
また、エンジンとモーターが直結されていて、発進の際に必ずエンジンが作動している必要がある方式では(ホンダ・インサイトなど)、発進のたびにエンジンを始動させる必要がある。この方式では、ハンパンに発進停止を繰り返すような渋滞時などの条件ではエンジンが停止しなくなるという問題がある。なので、エンジンとモーターの間にクラッチを設け、モーターだけで走行することが出来るような運転モードを設けることでこういった問題を解決している。
ブレーキ回生
インサイト
従来の車では、減速するときに、車が持つ運動エネルギーをブレーキシステムによって熱エネルギーに変換し、大気に放出していた。そこで、この運動エネルギーを、電気エネルギーに変換してバッテリーに蓄え、必要なときに取り出して有効活用しようというものである。
すなわち、発進や加速など、大きな駆動力を必要とする際に、モーターでエンジンをアシスト(補助)するときの電力として利用するのである。
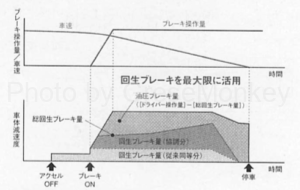
ブレーキ回生によって、急ブレーキではない普通のブレーキで、その制御時の速度まで加速する際に使ったエネルギーの5分の1程度を回収できると言われている。
ブレーキ回生もハイブリッドの方式によって差がある。減速時には通常のフットブレーキに加え、エンジンブレーキも作用する。フットブレーキの部分をブレーキ回生に回して運動エネルギーを回収したとしても、エンジンブレーキの分は回収することが出来ない。
プリウスではエンジンを停止した際に、運動エネルギーをすべて回収することが出来るが、インサイトの場合にはエンジンとモーターが直結しているので、エンジンブレーキをなくすことが出来ない。
そこで制動時にすべてのバルブの開閉を停止しポンピングロスをなくしてエンジン本体の純粋なフリクション(摩擦損失・引きずり抵抗)だけとなるようにしている。エンジン本体の摩擦も、燃費に影響してくるので徹底的に削減している。
バルブ休止を行わない場合、減速時に回収できるエネルギーは運動エネルギーのおよそ3分の1である。このバルブを休止することでエンジンの引きずり抵抗(ポンピングロスも含む)を約7割ほど減らすことができ、回生エネルギーを運動エネルギーの約3分の2まで増加させることが出来る。(ホンダ・インサイトの場合)
この問題も、エンジンとモーターの間にクラッチを設け、減速時にエンジンを停止することで解決することが出来る。
モーターで車の運動エネルギーを回収する
なぜモーターで運動エネルギーを回収出来るのかというと、モーターの作動原理を逆にしたようなものが発電の原理となるからである。モーターの作動原理を表すフレミングの左手の法則に対して、発電の原理を表すものが左手の法則の対象系となるフレミングの右手の法則である。
一般にDCモーターを無負荷状態で運転しても、印加する電圧に対してある回転数以上に回転は上がらない。なぜなら逆起電力が発生するからである。モーターが回転することによって、コイルには、磁束の方向を妨げる方向に逆起電力が発生する。その方向はモーターを回転させるために流している電流とは正反対の方向となる。これが逆起電力と呼ばれる所以である。
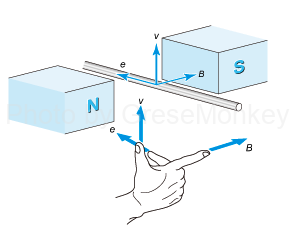
フレミング右手の法則
逆起電力は回転数の増加に応じてどんどん高くなるので、回転数が増加するにしたがってモーターを回転させるために流している電流は流れにくくなり、ある一定の回転数に達すると、それ以上に回転数は上がらなくなる。
そこで、制動時にモーターへの電流を遮断し、その代わりに発生している逆起電力を取り出してやる。これがモーターを発電機として働かせるブレーキ回生の原理である。
ところが、ブレーキ回生を行うと、フットブレーキをどうするかという問題が発生する。ブレーキ回生が働いた分、フットブレーキの制動力を減らさなければならないからである。
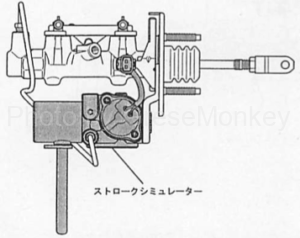
そこでフットブレーキの方には、ブレーキ回生が働いた分、フットブレーキの制動力を削減するような工夫がなされている。制動力の削減と同時に、ブレーキペダルには踏力に応じたストロークをすることが要求される。要するに、ブレーキ回生が働こうと働かなかろうと、従来の車と同様にブレーキペダルの踏み応えがあり、制動力を発生させることが要求されているのである。これに関しては、ストロークシュミレーターと称する装置が工夫されている。(後述)
エンジン最適条件での運転
ガソリンエンジンやディーゼルエンジンは、アクセル開度(アクセルペダルの踏み込み量、スロットルバルブ開度)が大きい方が熱効率が高くなる。すなわち燃料消費率は小さくなる。
それは、エンジン本体のフリクション(摩擦損失)が、アクセル開度には関係しないからである。つまり、アクセル開度を大きくしようと小さくしようと、エンジン本体のフリクションは変わらない。したがって、アクセル開度が小さい(低負荷)の運転条件では、噴射した燃料が少ない、すなわち発生する出力が小さいにも関わらす、アクセルを全開にしたときと同じフリクションが発生する。
よって低負荷運転時には消費した燃料による摩擦損失の割合が増大し、その分取り出せる出力(アウトプット、軸出力)の割合が減少するので、熱効率すなわち燃料消費率が悪化してしまう。
ガソリンエンジンでは、低負荷ほどポンピングロスが増加するのでさらに悪化する。
また、エンジン本体のフリクション(ポンピングロスを除く)は、大体エンジン回転数の1.5乗に比例するので、回転数を上げるほど増大する。よってガソリンエンジンやディーゼルエンジンは、できるだけ高負荷と低回転で運転することが高い効率をもたらすことが出来るということになる。
プリウスのようにエンジンの出力を発電機と車輪(駆動力)に分割することが出来れば、この最適条件に近い運転条件で運転することが出来る。
エンジンと車輪とは連結されておらず、発電機とだけ連結されているシリーズ型ハイブリッドでは、まさにこの最適条件だけで運転することが可能になる。これはシリーズ型ハイブリッドの特徴の一つである。
反対に、インサイトのようにエンジンとモーターが直結されている場合には、運転条件を選択できる余地はほとんどどない。
ハイブリッドカーの方式
ハイブリッドカーには、エンジンとモーター/発電機との組み合わせ方、すなわち車輪に対する駆動力の伝え方によっていくつかの方式がある。主なものは次の3方式である。
- シリーズハイブリッド
- パラレルハイブリッド
- シリーズ・パラレルハイブリッド
シリーズハイブリッド
エンジンで発電機を回し、その電力でモーターを回転させて車輪を駆動する。つまりエンジンと車輪の間にはプロペラシャフトのような機械的な連結がなく、エンジンは発電機を回転させるだけで。車輪を駆動するのはモーターのみというシステムである。
車輪を駆動するエネルギーが、エンジン、発電機、モーターというシステムを構成する要素を直列的(シリーズ)に流れるシステムである。
エンジンを最も効率的に運転してバッテリーを充電し、満充電になると停止する。
エンジンを最も効率のよい領域で運転することが出来るが、車輪を駆動するのがモーターなので、動力性能を優れたものにしようとするとモーターが高出力を必要とし、それに応じてバッテリーもある程度大きなものが必要になってくる。
また、エンジンの出力が一度すべて電力に変換されるので、長距離走行時における定速走行時の燃費が悪くなる。
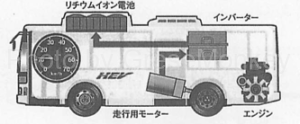
三菱エアロノンステップHEV
この方式を採用している例に上図の三菱エアロノンステップHEVがあるが、乗用車では殆ど例がない。しかし、近距離をモーターのみで走行するEVモードで走行し、バッテリーの残量が少なくなったらエンジンに切り替えるプラグインハイブリッドカーにふさわしい方式として、見直されているようである。
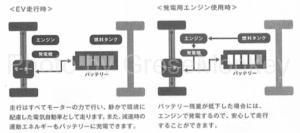
シリーズ方式
例としてはGMのシボレーボルトや、マツダの水素ロータリーエンジンを使ったプレマシーハイドロジェンREハイブリッドやスズキのスイフトプラグインハイブリッドなどがある。三菱のコンセプトFX/MiEVもプラグインハイブリッドであるが、高速行きの走行では高速回転で効率のよいエンジンの動力も利用する、パラレルハイブリッドとなる。また、低摩擦路面などではリヤモーターも使った4WD方式となる。

三菱のコンセプトFX・MiEV
パラレルハイブリッド
パラレルハイブリッドは、エンジンと車輪との間にも機械的な連結があって、エンジンからもモーターからも車輪を駆動することが出来る。つまり、車輪の駆動に対してエンジンとモーターが並列的に配置されているシステムである。
パラレルハイブリッドは構造がシンプルでコストも安くなるが、その反面、ハイブリッドの効果を徹底的に生かすことが出来ないため、燃費の改善は多少劣ってしまう。
市販に移されたメルセデスベンツS400ブルーハイブリッドの他、欧米の多くのメーカーがテストを重ねている。その中でパラレルハイブリッドの弱点を改善するために、エンジンとモーターとの間にクラッチを設けて両者の連結を切り離すことが出来るようにしたものが多く見られる。日産が市販したフーガハイブリッドもその一つである。
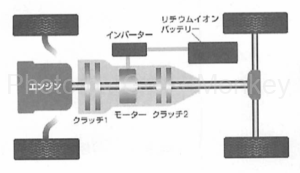
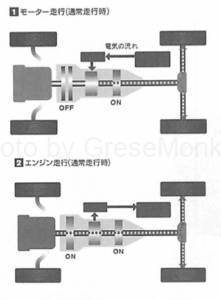
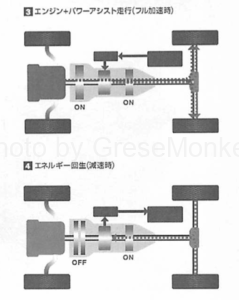
フーガハイブリッドの作動図
パラレル方式であるが、エンジンとモーターとの間にクラッチを設けて、モーター走行できるのが特徴である。
シリーズ・パラレルハイブリッド

トヨタのプリウスは、エンジンの出力を車輪に駆動する分と発電機を回転させる分とに分割し、発電機で発電した電力でモーターを回転させることが出来る。したがって、車輪を駆動するのは、エンジン出力の分割分とモーター出力が合わさった形となる。つまり、パラレルハイブリッドにシリーズハイブリットの部分が加わったシステムで、シリーズ・パラレルハイブリッドなどと呼ばれている。
このように車輪をエンジン出力の分割分とモーター出力の合力で駆動するため、比較的小さなエンジンでも高い動力性能を持たせることが出来る。
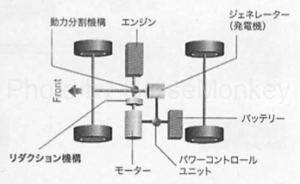
シリーズ・パラレル方式
エンジンの出力を、分割機構によって走行用と発電用に任意の割合で分配できるので、運転条件に応じてエンジンとモーターの最適な条件で組み合わせることが可能になる。また、走行中にエンジンを停止したり、モーターのみで発進、走行することが出来る。高速道路ではエンジンを効率のよい回転数で運転し、加速時にモーターの出力を追加することで燃費を改善する。
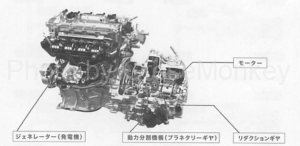
プリウスの主要ユニット
構造は複雑になるが、ハイブリッドとして一つの理想型に近い方式であると言える。しかしながら、複雑な制御技術が必要であり、これを実用化したのは現在のところトヨタだけである。
ハイブリッドカーのブレーキ制御
燃費の向上を狙って回生ブレーキをできるだけ利用しようとすると、ブレーキシステムの構成に難しさが生じる。なぜならば、回生ブレーキ自体が、バッテリーの充電状態や車速に左右されるなど、発生状態が一致しないからである。さらに、車両が必要とする回生ブレーキも含めたトータルでのブレーキ制動力も、穏やかなブレーキから急ブレーキまで千差万別である。
それでもドライバーが望む制動力に対し、回生ブレーキの大小にかかわらず常に違和感のない、通常の車と同じようなブレーキペダルの踏み込みストロークや踏力であることが要求される。
通常の車の場合、ブレーキ圧(ピストンに作用する圧力)とブレーキペダルのストロークはいっての関係にある。なので、ハイブリットカーにおいてもこれを実現する必要がある。
このブレーキ感覚を実現するのがストロークシュミレーターである。
ホンダ車の場合
作動原理は、プッシュロッドによってストロークピストンが押されると、ゴム製のストロークダンパーがつぶされていくことで,必要な踏力とストロークの関係を得ることが出来る。
目標とするブレーキ圧は、減圧前のマスターシリンダー圧から回生ブレーキに相当する圧力を引き算した値となる。
よってマスターシリンダー圧をこの目標値となるようにリニアソレノイドバルブを制御することが必要である。
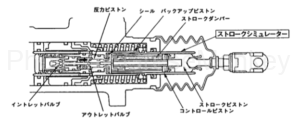
ストロークシュミレーターの構造
回生ブレーキと油圧ブレーキの協調制御
油圧サーボブレーキシステム
- RGE:プレッシャーレギュレータ圧を検出することで、ブレーキ操作量がわかる。
- ACC:アキュームレータ圧を検出することで、蓄圧状態がわかる。
- MC:マスターシリンダー圧は、サーボユニットで制御された油圧がわかる。
トヨタ車の場合
トヨタ車の場合、ストロークシュミレーターの作動原理は油圧式の一種のアキュームレーターの原理を応用したものでブレーキペダルを踏み込むと、踏力に応じた液量がストロークシュミレーターに流れ込むことで自然なストロークを実現している。
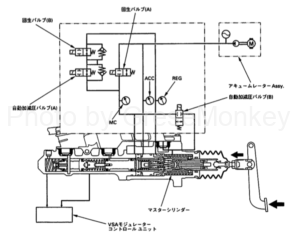
マスターシリンダーとストロークシュミレーター
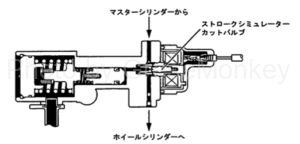
ストロークシュミレーターの断面
下図のブレーキシステムの概要において、パワーサプライで生成した高圧は、リニアソレノイドバルブで調圧され、各ブレーキキャリパーに作用することになる。
リニアソレノイドバルブは回生ブレーキと油圧ブレーキの協調作用によって制御されるが、制御の基本となるドライバーの要求制動力はブレーキペダルの操作量で代表され、操作量はブレーキペダルのストロークセンサーによって検出される。
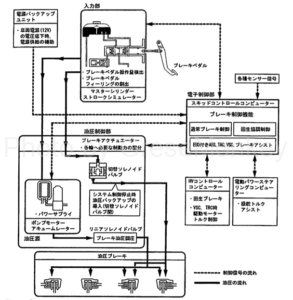
ブレーキシステムの概要
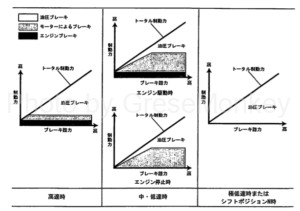
協調制御による回生ブレーキと油圧ブレーキによる制動力分担